











複雑なシステム工学において、システムの挙動を理解することは、その構造を定義することと同等に重要である。SysMLアクティビティ図は、この動的挙動を捉えるための主要なメカニズムである。これらは、システムが時間とともにどのように機能するかを記述するための視覚的言語を提供し、データや制御信号をさまざまなプロセスを通じて移動させる。このガイドでは、アクティビティ図の技術的深さを検討し、その構築、意味論、および厳格なエンジニアリング環境における応用について包括的に紹介する。
静的構造モデルとは異なり、アクティビティ図は「制御の流れ」と「データの流れ」に注目する。これらは、システム内の運用手順、自動化シーケンス、および意思決定論理を定義するために不可欠である。これらのワークフローをマッピングすることで、エンジニアは論理の検証、ボトルネックの特定、要件から実装へのトレーサビリティの確保が可能になる。
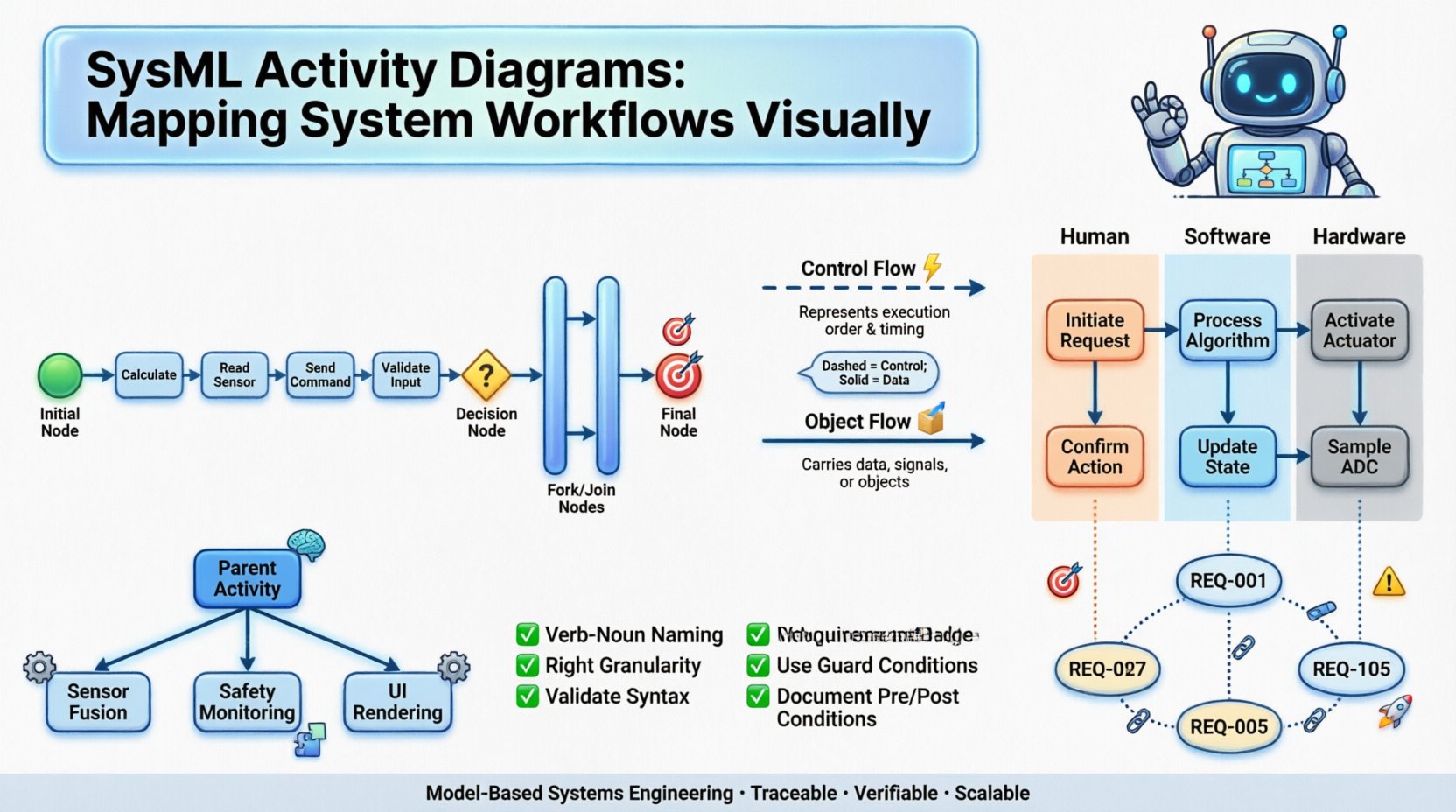
SysMLアクティビティ図の基礎 🧠
アクティビティ図は、制御の流れとデータの流れを描写する行動図である。システムモデリング言語(SysML)において、これらの図は単なるフローチャート以上のものである。オブジェクト管理グループ(OMG)の標準に準拠した、システム挙動の形式的表現である。この形式的定義により、モデルベースシステムエンジニアリング(MBSE)ツールが解析、シミュレーション、検証を実行できる。
アクティビティ図の核心的な目的は、システム動作に関する特定の問いに答えることである:
- 目標を達成するために実行しなければならないアクションは何か? 🎯
- これらのアクションはどのような順序で発生するか? ⏱️
- データはこれらのアクションの間でどのように渡されるか? 📦
- 意思決定は実行の流れをどこで変更するか? 🚦
- 責任は、異なるシステムコンポーネント間でどのように分配されるか? 🛠️
これらの図は非常に多様性に富んでいる。高レベルのビジネスプロセスから、詳細な低レベルの制御論理まで、あらゆるものモデル化できる。粒度は、特定のエンジニアリングフェーズに必要な抽象化レベルによって決定される。
コア構造要素 🔨
有効なアクティビティ図を構築するためには、SysML仕様で定義された構成要素を理解する必要がある。これらの要素が組み合わさることで、単純なプリミティブから複雑な挙動が構成される。
アクションと挙動 🏗️
「アクション」は挙動の基本単位である。システムが実行する作業単位または特定の操作を表す。アクションは以下の通りである:
- プリミティブ:「計算」や「読み取り」などの基本操作。
- 別の場所で定義された挙動を呼び出す。モデル内の他の場所で定義された挙動を呼び出す。
- 実行指定:実行時に行われるアクションのインスタンス。
各アクションには入力インターフェースと出力インターフェースがある。これにより、一つのアクションの出力が別のアクションの入力となるようにアクションを連結できる。このモジュール性は、大規模なモデルを維持するために不可欠である。
ノードと制御フロー 🔗
ノードは制御フローを定義し、アクションが実行される順序を決定します。標準的なノードには以下が含まれます:
- 初期ノード: 図の開始点です。出力エッジは1つで、入力エッジは存在しません。
- 終了ノード: アクティビティが正常に終了する終了点です。
- 決定ノード: 条件に基づいて制御フローをルーティングするダイアモンド型。入力エッジは1つで、出力エッジは複数あります。
- フォークノード: 単一のフローを複数の並行フローに分割します。
- ジョインノード: 複数の並行フローを1つのフローに統合します。
- アクティビティ終了ノード: 終了ノードに似ていますが、すべての並行フローを含む、全体のアクティビティの終了を示します。
フローとデータオブジェクト 📥
制御ノードが順序を管理する一方で、オブジェクトフロー データの移動を管理します。オブジェクトフローは、アクションの出力ピンを別のアクションの入力ピンに接続します。これにより、センサーの読み取り値やコマンド信号などの情報の転送を表します。
これらのフロー内のデータオブジェクトは型指定されています。SysMLモデラーは、システム全体で型の安全性を確保するためにデータ型を定義する必要があります。これにより、互換性のないデータがプロセス間で渡される論理エラーを防ぎます。
制御フローとオブジェクトフローの違い 🔄
制御フローとオブジェクトフローの違いを理解することは、正確なモデリングに不可欠です。両者を混同すると、シミュレーションエラーまたは誤った検証結果につながる可能性があります。以下の表は主な違いを示しています。
| 特徴 | 制御フロー | オブジェクトフロー |
|---|---|---|
| 目的 | アクションの順序を管理します。 | データの移動を管理します。 |
| 矢印の種類 | 開放矢印頭。 | 開放矢印頭。 |
| 依存関係 | アクションをトリガーするにはトークンが必要です。 | データオブジェクトの生成が必要です。 |
| 並行性 | 分岐・結合が可能です。 | 分岐・結合が可能です。 |
| 例 | 開始 → 処理 → 終了。 | データ → 処理 → 結果。 |
実際には、両方のフローがしばしば共存する。制御トークンがアクションをトリガーし、そのアクションによってオブジェクトフローが生成される。この二重メカニズムにより、データ駆動型かつ論理駆動型のシステムを堅牢にモデル化できる。
階層モデルの構築 📊
SysMLアクティビティ図の強みの一つは、階層的分解をサポートできる点である。複雑なシステムは、単一の平坦な図にモデル化すると読みにくくなる。階層的モデリングにより、エンジニアはアクティビティをサブアクティビティに分解できる。
- 委任: 親図のアクションは、その振る舞いをサブアクティビティ図に委任できる。
- エントリ/エグジットポイント: サブアクティビティには、適切なフロー統合を確保するために明確なエントリポイントとエグジットポイントが必要である。
- スコープ: 変数やパラメータはアクティビティにスコープを設定できるため、グローバル変数の曖昧さが軽減される。
このアプローチは、システム工学における「分割統治」戦略を支援する。高レベルの図では主要なシステムフェーズを示し、低レベルの図では特定のサブシステムの論理を詳細に記述する。この関心の分離は、異なるチームが同時に異なるサブ図を扱えるため、チーム協働にとって不可欠である。
パーティションとスイムレーン 🛣️
システムに複数のステークホルダーまたは異なるサブシステムが関与する場合、パーティション (しばしばスイムレーンと呼ばれる)が使用される。パーティションは、その領域内のアクションを実行する責任を負う分類子を表す。
パーティションの一般的な使用例には以下が含まれる:
- 人間 vs. 機械:オペレータの入力と自動システムの応答を区別する。
- サブシステムの境界:推進システムの論理と誘導システムの論理を分離する。
- 時間的フェーズ:時間窓や運用モードごとにアクションをグループ化する。
パーティションを使用することで、所有権と責任が明確になる。この問いに答えることができる:「この特定のアクションに対して、誰または何が責任を負っているのか?」これは、検証および検証(V&V)プロセスにおいて特に有用であり、特定のテストケースを特定のサブシステムに割り当てる必要があるためである。
システム要件との統合 📝
アクティビティ図は孤立して存在しない。システムの動作を駆動する要件とリンクされている必要がある。SysMLは要件トレーサビリティ、要件をアクティビティまたはアクションにリンク可能にする。
このトレーサビリティにより、いくつかの重要なエンジニアリング機能が可能になる:
- 影響分析: 要件が変更された場合、エンジニアはすぐに影響を受けるアクティビティを即座に確認できる。
- カバレッジ検証: エンジニアは、すべての要件がモデル内の対応する動作を持っていることを検証できる。
- ギャップ分析: 要件にリンクされていない動作(過剰装飾)や、実装のない要件を特定する。
このリンクを維持するため、各アクションは特定の要件IDに追跡されるべきである。これにより、モデルが要件を駆動し、要件がモデルを検証する双方向リンクが作成される。
モデリングのベストプラクティス 🛠️
有効な図を描くことは一つのことだが、保守可能で明確なモデルを構築することは別の問題である。ベストプラクティスを遵守することで、プロジェクトのライフサイクル全体にわたり図が有用なまま保たれる。
一貫した命名規則 🏷️
SysMLにおける名前は、スコープ内で一意でなければならない。アクションは「動詞+名詞」のパターン(例:「エンジン初期化」、「センサー読み取り」)で命名すべきである。この規則は可読性を向上させ、下位のコードや外部ドキュメントを読まずとも図が理解できるようにする。
適切な粒度 📏
よくある間違いは、あまり詳細なアクティビティを作成することである。アクションがしすぎている場合は削除し、隣接するアクションと統合すべきである。アクションが複雑すぎる場合は、サブアクティビティに分解すべきである。目安は、アクションが独立して実装またはテスト可能になるレベルに保つことである。
パーティション間のフローを最小限に抑える 🚧
パーティション間のフローは必要だが、過剰な交差線は図の読みにくさを招く。設計者は、関連するアクションを同じパーティション内にグループ化することを心がけるべきである。データをパーティション間で渡す必要がある場合は、フローが明確にラベル付けされ、方向が明確になるようにする。
検証と構文チェック ✅
図を共有する前に、構文チェックを実行する。すべてのノードが有効な接続を持っていることを確認する。垂れ下がるエッジや孤立したノードは、モデルにエラーがあることを示す。自動化ツールは、欠落しているフローや接続されていない初期ノードを検出でき、後のデバッグ時間を大幅に節約できる。
一般的なモデリングの課題 ⚠️
経験豊富なモデラーでも困難に直面することがある。これらの課題を早期に認識することで、再作業を防ぐことができる。
デッドロックとライブロック
A デッドロックは、制御フローが進展ができない状態に達したときに発生する。これは、入力フローの一つが欠けているjoinノードでよく発生する。A ライブロックは、システムが進展せずに無限ループするときに発生する。これらは厳密なシミュレーションによって回避しなければならない。
曖昧な意思決定論理
決定ノードにはガード条件が必要です。ガード条件が互いに排他的でないか、網羅的でない場合、動作が曖昧になります。たとえば、「温度 > 100」である条件と、「温度 > 80」である条件がある場合、後者の条件は冗長です。条件は明確で決定論的でなければなりません。
データフローの複雑さ
複雑な図を介してデータオブジェクトを追跡することは、負担になることがあります。オブジェクトフローが多すぎると、データ整合性の検証が難しくなります。重要なデータ経路にオブジェクトフローを集中させ、制御フローを簡潔にすることが推奨されます。
ライフサイクルフェーズにおける応用 🚀
アクティビティ図は静的な文書ではなく、システムのライフサイクルに伴って進化します。その応用は開発フェーズによって異なります。
- 概念段階:高レベルの図は運用概念を定義します。システム動作の「何を」および「なぜ」に焦点を当てます。
- 定義段階:詳細な図は論理を定義します。「どのように」に焦点を当てます。入力および出力パラメータが定義されます。
- 実装段階:図はコードやテストスクリプトの生成に使用されます。実行可能になるほど正確でなければなりません。
- 検証段階:図はテストのベースラインとして機能します。テストケースはアクティビティパスから直接導出されます。
- 保守段階:図はシステムの現在の状態を文書化します。新規エンジニアがレガシーロジックを理解するのを助けます。
高度な機能:受容条件とパラメータノード 🎛️
複雑なシステムでは、基本的なフローだけでは不十分なことがよくあります。SysMLは複雑な論理を扱うための高度な機能を提供します。
受容条件
一つの 受容条件受容条件は、アクションが完了する前に満たされなければならないガード条件です。これは決定ノードとは異なります。決定ノードは制御をルーティングしますが、受容条件はアクションの結果を検証します。たとえば、「ペイロードの検証」アクションには、次の処理に進む前にチェックサムが一致するかを確認する受容条件が設定されることがあります。
パラメータノード
パラメータノードにより、アクティビティレベルでの入力および出力の定義が可能になります。これによりアクティビティのインターフェースが定義されます。パラメータは、各エッジにオブジェクトフローとして明示的に定義しなくても、アクティビティ間で渡すことができます。これによりモデルの視覚的表現が簡素化されます。
モデルの一貫性の確保 🧩
モデル全体での一貫性は大きな課題です。システムが拡大するにつれて、アクティビティ図は他の図形式と一貫性を保たなければなりません。
- 状態機械の一貫性:状態機械の状態がアクティビティ図のアクションと衝突しないように確認してください。
- シーケンス図の一貫性:シーケンス図で交換されるメッセージは、アクティビティ図のフローと一致している必要があります。
- ブロック定義の一貫性: 活動に関与するブロックは、システムの構造的定義と一致しなければならない。
モデルの一貫性ツールは大規模なプロジェクトにおいて不可欠である。一つの図の変更が他の図の論理を破壊した際に、エンジニアに警告を発する。この予防的なアプローチにより、モデル内の技術的負債の蓄積を防ぐことができる。
機能要約 🏁
SysMLアクティビティ図は、モデルベースシステム工学の基盤である。システムの複雑性を管理するための必要な抽象化を提供するとともに、検証に必要な厳密さを維持する。制御フロー、オブジェクトフロー、パーティションを活用することで、エンジニアは人間が読みやすく、機械が解析可能なモデルを作成できる。
成功の鍵は、規律あるモデリングにある。命名規則の遵守、粒度の管理、要件へのトレーサビリティの維持により、図がプロジェクトライフサイクル全体を通じて価値ある資産のまま保たれる。高レベルの運用分析や詳細な論理検証に使用されるにせよ、これらの図は抽象的な要件と具体的な実装の間のギャップを埋める。
システムの複雑性がさらに増す中で、正確な行動モデリングの役割はますます重要になる。これらの図を習得するための時間の投資は、リスクの低減、明確なコミュニケーション、より強固なシステム設計という恩恵をもたらす。