











システムモデリング言語(SysML)は、システム工学の応用に特化したモデリング言語として広く知られている。複雑なシステムの記述、分析、設計を目的として設計されている。航空宇宙プロジェクト、自動車設計、ソフトウェアアーキテクチャなど、どのような分野で作業を行っても、用語を理解することはステークホルダー間の明確なコミュニケーションに不可欠である。このガイドでは、分野内で使用される核心的な用語を解説し、技術的な環境を明確に理解しながら進める手助けをする。
システムモデリング言語入門 🏗️
SysMLは、システム工学のニーズに適応するため、統合モデリング言語(UML)を拡張したものである。UMLはソフトウェアに重点を置くのに対し、SysMLはシステムの物理的、情報的、行動的側面を扱う。システムがどのように機能するかを記述するための図と要素のセットに依存している。これらの用語を習得することで、エンジニアは正確かつ理解しやすいモデルを作成できる。
初心者として始める際には、略語や特定の定義に遭遇するのはよくあることである。この用語集では、図や文書でよく見られる最も頻出する用語をカバーしている。目的は、単なる定義ではなく、文脈を提供することであり、各用語が全体のモデリング作業の中でどのように位置づけられているかを理解できるようにすることである。
核心的な構造要素 🔨
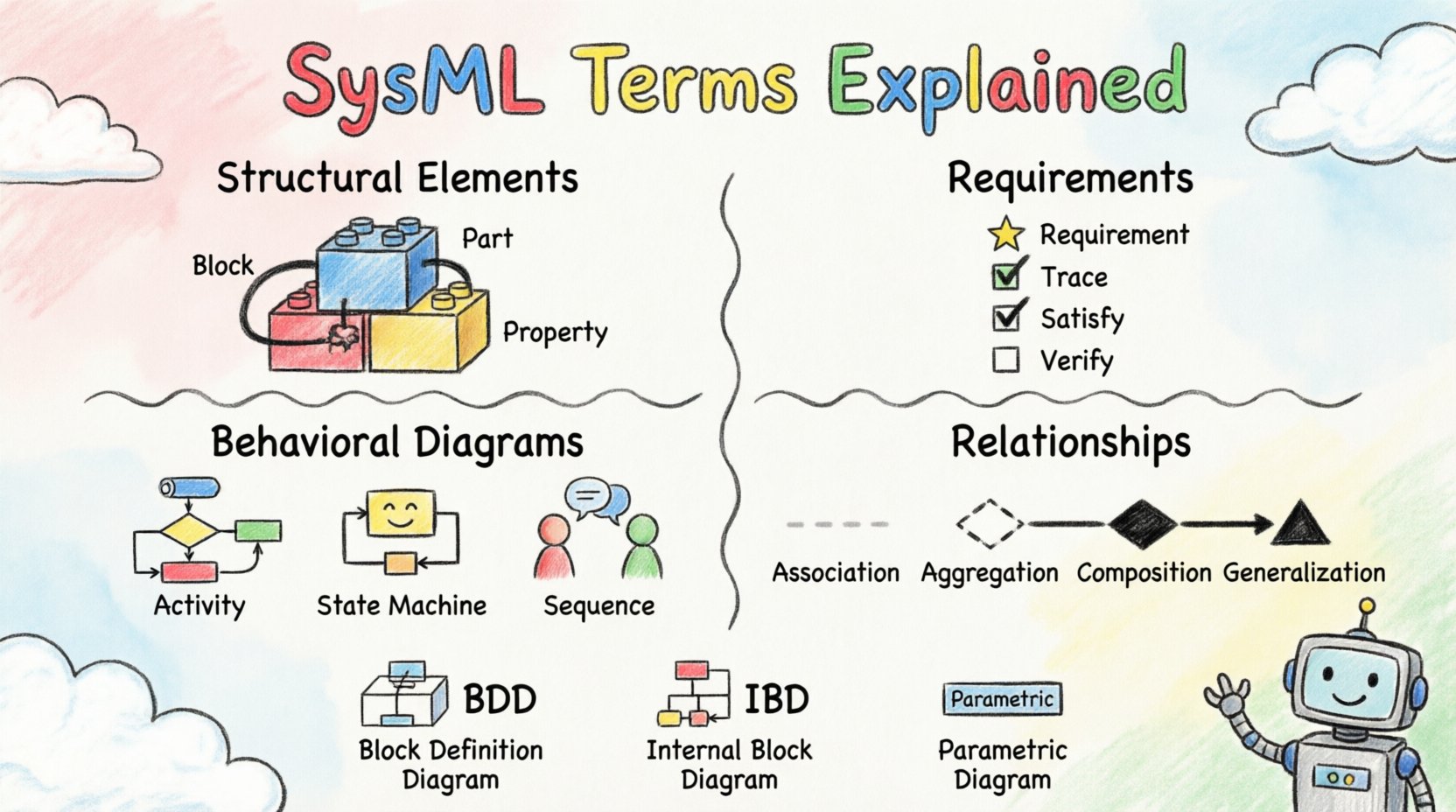
システムの構造は、その物理的または論理的な構成を定義する。SysMLでは、主にブロック(Blocks)を使って記述される。ブロックは、構造の単位を表し、部品、部品、あるいはシステム自体を含む。これは、システムが何で構成されているかを定義する基本的な構成要素である。
- ブロック:明確なインターフェースと動作を持つ構造の単位。機能とデータをカプセル化する。
- 部品:より大きなブロック構造内のブロックの特定のインスタンス。システム内のコンポーネントを表す。
- プロパティ:ブロックの属性であり、データや特徴を記述する。プロパティには、整数や文字列などの型が設定できる。
- 参照プロパティ:別のブロックインスタンスにリンクするプロパティ。所有権を持たない接続を形成する。
- 値プロパティ:別のオブジェクトへの参照ではなく、数値やテキストなどの単純な値を保持するプロパティ。
ブロックと部品の違いを理解することは重要である。ブロックは型を定義し、部品は構成内の特定のインスタンスを定義する。たとえば、エンジンはブロック型になり得るが、エンジンの中の特定の車は部品である。
要件の理解 📝
要件は、システムが何を実行すべきか、または満たすべき制約を定義する。これらは検証と検査の基盤となる。SysMLでは、要件は一級の要素として扱われ、他のモデル要素とリンク可能である。
- 要件:満たされなければならない条件または機能。他のモデル要素にトレース可能な特定の要素である。
- トレース:ある要素が別の要素から導出されたものであるか、またはそれを満たしていることを示す関係。要件と設計要素を結ぶためによく使われる。
- 精緻化: ある要素が別の要素よりも詳細を提供することを示す関係。たとえば、高レベルの要件が詳細な仕様に精緻化されることがある。
- 満足させる: 設計要素が特定の要件を満たしていることを示す関係。
- 検証する: テストケースまたは活動が要件が満たされていることを確認することを示す関係。
効果的な要件管理により、最終製品がステークホルダーのニーズと一致することが保証される。トレースを使用することで、エンジニアは変更の影響を把握できる。要件が変更された場合、その影響を受ける設計ブロックや動作を追跡できる。
振る舞い図 🔄
振る舞いは、システムが時間とともにまたはイベントに応じてどのように動作するかを説明する。SysMLは、この振る舞いを可視化するための複数の図形式をサポートしている。各形式は、相互作用の複雑さに応じて特定の目的を果たす。
アクティビティ図
アクティビティ図は、制御およびデータの流れに注目する。フローチャートに似ているが、並行処理やオブジェクトの流れをサポートしている。
- アクティビティ: イベントによって開始される計算の段階。アクティビティ図の主要な要素である。
- 制御フロー: アクティビティが発生する順序。実行の順序を決定する。
- オブジェクトフロー: アクティビティ間でのデータまたはオブジェクトの移動。生成されたり消費されたりするものを示す。
- 入力ピン: アクティビティがデータやオブジェクトを受け取るポイント。
- 出力ピン: アクティビティがデータやオブジェクトを送信するポイント。
状態機械図
状態機械は、要素が取りうる異なる状態と、イベントに基づいてそれらの状態間をどのように遷移するかをモデル化する。
- 状態: オブジェクトの寿命中に、ある活動を実行するか、イベントを待つ状態または状況。
- 遷移: 一つの状態から別の状態への移動。遷移はイベントによって引き起こされる。
- イベント: 特定の時間に発生し、遷移を引き起こすもの。シグナル、呼び出し、時間遅延、または条件の変化が含まれる。
- ガード条件: 遷移が発生するためには真でなければならない論理式。
- 履歴:複合状態の最後にアクティブだったサブ状態を記憶する擬似状態。
シーケンス図
シーケンス図は、時間の経過とともにオブジェクト間の相互作用を示す。システムの部分間のメッセージの流れを理解するのに役立つ。
- ライフライン:時間の経過に伴うクラスまたはオブジェクトのインスタンスを表す。
- メッセージ:1つのオブジェクトから別のオブジェクトへの通信。同期的または非同期的であることができる。
- アクティベーション:オブジェクトが動作を実行している期間。
- 結合断片:ループやオプション部分などの相互作用のグループ。
関係と接続 🔗
関係は、要素どうしがどのように相互作用するかを定義する。モデルを統合するための接着剤である。正確なモデリングのためには、適切な関係を選択することが不可欠である。
| 関係 | 説明 | ユースケース |
|---|---|---|
| 関連 | 1つの型のオブジェクトが別の型のオブジェクトと接続されていることを示す構造的関係。 | 所有権のない一般的な接続。 |
| 集約 | 部分が全体に依存せずに独立して存在できる、全体と部分の関係。 | 弱い所有関係、たとえば部署には従業員がいる。 |
| 合成 | 部分が全体なしでは存在できない、強い全体と部分の関係。 | 強い所有関係、たとえば家には部屋がある。 |
| 一般化 | 子が親から特徴を継承する親子関係。 | クラス階層または継承。 |
| 実現 | ある要素が別の要素のインターフェースを実装する関係。 | インターフェースの実装。 |
集約と構成はしばしば混同される。主な違いはライフサイクル管理にある。構成では、全体が破棄されると、部分も破棄される。集約では、全体が破棄されても、部分は生存する。
制約とパラメータ 📏
すべての情報が視覚的に表現できるわけではない。制約により、遵守しなければならないルールを追加できる。パラメータは、システムに関連する数値を定義するのに役立つ。
- 制約ブロック: 制約の集合を表すブロックの一種。他のモデル要素に適用できる。
- 制約プロパティ: 制約ブロック内のプロパティで、特定のルールを表す。
- パラメータブロック: システムのパラメータを定義するために使用するブロック。設定可能な変数を含む。
- パラメータプロパティ: パラメータブロック内のプロパティ。サイズ決めや設定にしばしば使用される。
- OCL(オブジェクト制約言語): 制約を指定するために使用される形式言語。正確な数学的定義を可能にする。
制約を使用することで、モデルが物理法則やビジネスルールに従うことが保証される。たとえば、制約として「車両の重量は一定の限界を超えてはならない」というルールを設けることができる。パラメータにより、構造を変更せずにこれらの値を変更してシミュレーションを実行できる。
主要な図の要約 📊
記憶を助けるために、言語で利用可能な主要な図の種類を要約する。各図は、モデリングライフサイクルにおける異なる目的を果たす。
| 図の種類 | 焦点 | 主な要素 |
|---|---|---|
| ブロック定義図(BDD) | 構造と分類 | ブロック、関係、要件 |
| 内部ブロック図(IBD) | 内部構造 | 部品、プロパティ、フロー |
| 要件図 | 要件管理 | 要件、トレース、精緻化 |
| ユースケース図 | 機能要件 | アクター、ユースケース、関係性 |
| アクティビティ図 | 行動フロー | アクティビティ、フロー、プール |
| 状態機械図 | 状態遷移 | 状態、遷移、イベント |
| シーケンス図 | 時間経過に伴う相互作用 | ライフライン、メッセージ、活性化 |
| パラメトリック図 | 制約と方程式 | 制約、パラメータ、変数 |
実際のシナリオにおける用語の適用 🌍
定義を知ることは第一歩にすぎません。これらの用語を正しく適用するには、ワークフローを理解する必要があります。一般的なモデリングプロセスは要件から始まります。要件図を使用して、システムが何をすべきかを定義します。
次に、ブロック定義図を使用して構造を定義します。ここでは主要なコンポーネント用のブロックを作成し、それらの関係性を定義します。システムがサブシステムから構成されていることを示すために、コンポジションを使用するかもしれません。その後、内部ブロック図を使用して、これらのコンポーネントが内部的にどのように接続されているかを示します。ここではデータフローとインターフェースを定義します。
次に、行動をモデル化します。システムに複雑な論理がある場合は、状態機械図が適切です。プロセスを含む場合は、アクティビティ図の方が適しています。シーケンス図は、操作中に特定の部分間の相互作用を明確にするのに役立ちます。
最後に、パラメトリック図を使用して制約を追加します。これにより、物理的限界が尊重されることを保証します。このプロセス全体を通じて、トレースがすべての要素を元の要件に戻すようにリンクします。これにより、ステークホルダーによって定義された目的のない設計要素が存在しないことを保証します。
避けるべき一般的な落とし穴 ⚠️
経験豊富なエンジニアでも、用語を定義する際に誤りを犯すことがあります。一般的な誤りを認識しておくことで、モデルの品質を維持できます。
- 一般化の過剰使用:必要でない限り、深い継承階層を作成しないでください。モデルが複雑になります。
- 構造と行動の混同:構造図と行動図を分けてください。ブロック定義図内に行動論理を含めないでください。
- トレースを無視する:要件を設計要素にリンクしないと、検証が難しくなります。
- 曖昧な制約:曖昧な制約を書かないようにしましょう。正確さを求めるにはOCLを使用してください。
- パラメータを無視する:パラメータを定義しないと、システムのシミュレーションや分析が制限される可能性があります。
用語に関する結論 📚
システムモデリング言語の語彙を習得することは、一連の旅です。実際のモデルに触れ、練習を重ねる必要があります。Blocks、Requirements、Relationshipsなどの基本的な用語を理解することで、しっかりとした基盤が築かれます。この用語集は参考となるものですが、真の習得は実践から生まれます。
一貫性が鍵です。プロジェクト全体で用語の使用を統一してください。ステークホルダーが言語を理解すれば、コミュニケーションが向上します。これにより誤りが減り、開発が加速します。現代のシステムの複雑さは正確なモデリングを要求しており、正確な用語がそれを可能にするツールです。
これらの概念をさらに学び進める中で、 unfamiliar な用語に出会ったときは、このガイドを参照してください。要素間の関係性は、定義そのものよりも重要な場合が多いです。部分がどのようにつながって全体を形成しているかに注目してください。この包括的な視点こそが、システム工学の本質です。