











システム工学は、システムが「何であるか」を記述するだけでなく、時間の経過とともに「どのように振る舞うか」を記述する能力に大きく依存している。静的な構造、たとえばブロック図は、コンポーネントとそれらの関係性を定義する。しかし、動的な振る舞いには別のアプローチが必要となる。SysMLステートマシンは、この動的な性質をモデリングするための必要な枠組みを提供する。このガイドでは、堅牢なステートマシン図を作成するメカニズムについて探求し、システム設計が現実世界の運用論理を正確に反映していることを保証する。我々は、コアとなる要素、実行の流れ、そして不要な混乱を招くことなく複雑性を扱うための戦略を検討する。
コアの目的を理解する 🏗️
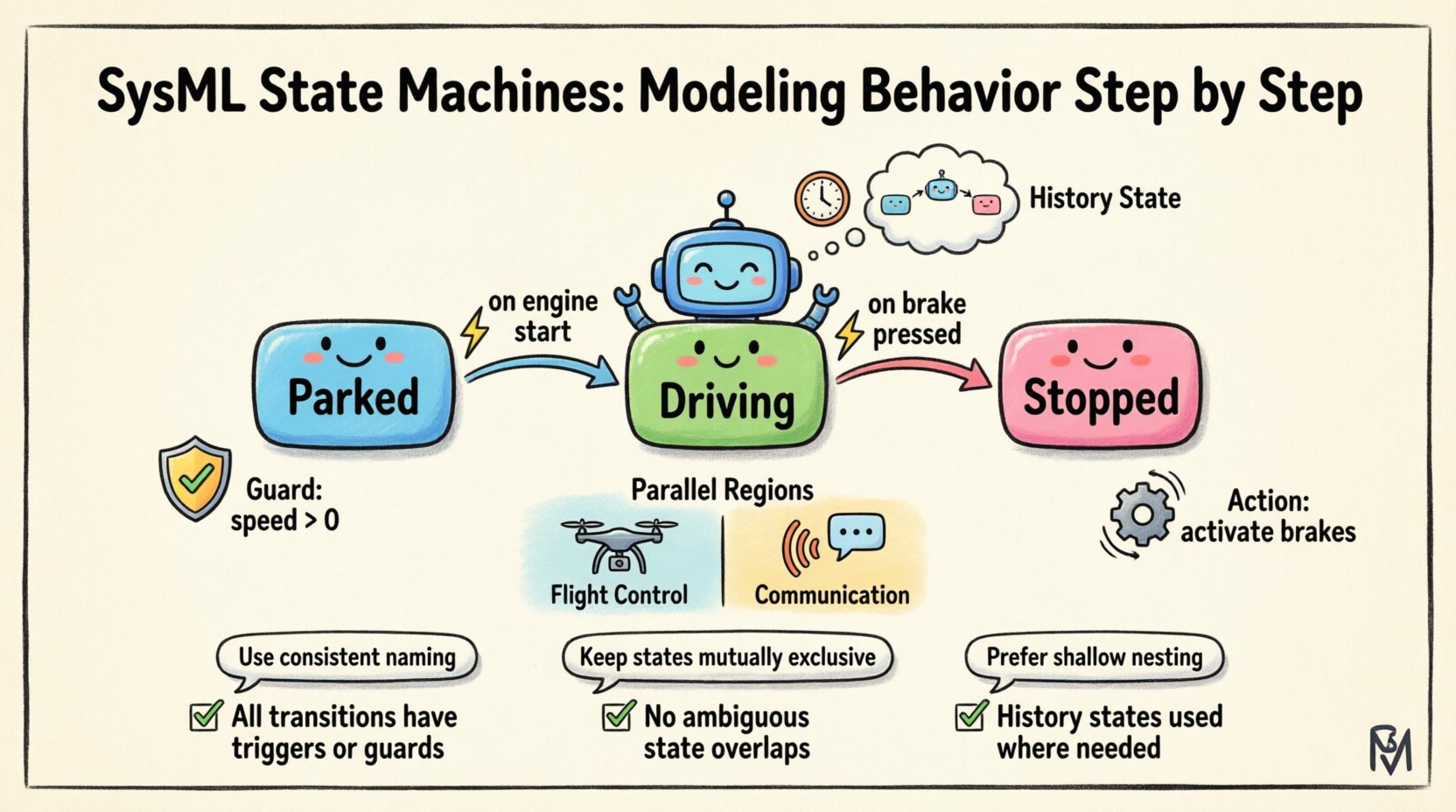
ステートマシン図は、オブジェクトの取りうる状態と、それらの状態間を遷移させるイベントを記述する。フローチャートがプロセスの流れを描くのに対し、ステートマシンはエンティティの状態を追跡する。この違いは、現在の状況が将来の行動を決定するシステムにおいて極めて重要である。たとえば、自律走行車は「駐車中」の状態か「走行中」の状態かによって、異なる振る舞いを示さなければならない。
これらのモデルを構築する際の目標は明確さである。適切に設計されたステートマシンは、システムが入力に対してどのように反応するかについての曖昧さを排除する。オブジェクトのライフサイクル、すなわち作成から終了までの過程を定義する。このライフサイクル管理は、すべての運用シナリオがカバーされていることを確認するために不可欠である。これがないと、論理的な穴が発生し、展開時にシステム障害を引き起こす可能性がある。
ステートマシンが重要な理由
-
明確さ:視覚的表現は、複雑な論理を分析する際の認知的負荷を軽減する。
-
検証:すべての可能な経路のシミュレーションと検証を可能にする。
-
ドキュメント化:開発者やエンジニアにとっての唯一の真実の情報源となる。
-
一貫性:システム全体にわたって振る舞いのルールが一貫して適用されることを保証する。
基本要素の定義 ⚙️
ステートマシンを構築するには、原子的な構成要素を理解する必要がある。各要素は論理フローにおいて特定の機能を果たす。これらの要素を誤って使用すると、保守や解釈が困難なモデルになってしまう。
状態
状態は、オブジェクトが特定の条件を満たす、ある活動を実行する、またはあるイベントを待つという状態を表す。これらはグラフのノードである。状態は単純な状態または複合的な状態のいずれかである。
-
単純状態:内部構造を持たない状態。
-
複合状態:自身の内部ステートマシンを含む状態。これによりネストが可能となり、大きな振る舞いを扱いやすい部分的な振る舞いに分解することで、複雑性を管理できる。
-
最終状態:ライフサイクルの終了を示す。複数の最終状態が存在してもよいが、各遷移経路は理想的には一つの最終状態に到達すべきである。
遷移
遷移は状態をつなぐ。これは、ある状態から別の状態への移動を表す。遷移はイベントによって引き起こされ、関連するガード条件が満たされている場合にのみ発生する。遷移が発生すると、遷移に定義されたアクションが実行される。
イベント
イベントは遷移を引き起こすトリガーである。信号イベント、コールイベント、変化イベント、時間イベントのいずれかである。イベント自体は論理を実行しない。遷移プロセスを開始する役割を果たす。
論理フローの構築 🛣️
振る舞いモデルを構築するには、状態を遷移でつなぐ必要がある。このセクションでは、遷移の実行を制御する具体的な属性について詳述する。
トリガーとガード
遷移は通常、トリガーを含みます。これは、システムが移動を検討するよう起こすイベントです。しかし、移動が常に正しい反応というわけではありません。ガード条件はフィルターの役割を果たします。ガードは、遷移が発火するためには真に評価されなければならないブール式です。
|
要素 |
機能 |
例 |
|---|---|---|
|
トリガー |
遷移を開始する |
ボタンが押された |
|
ガード |
条件を検証する |
[battery_level > 20%] |
|
アクション |
遷移中に実行される |
log_entry() |
システムが「メンテナンスモード」に入るとするシナリオを考えてみましょう。トリガーはオペレータからのコマンドかもしれません。しかし、ガード条件は、システムが現在重要なタスクを実行していないことを要求するかもしれません。このトリガーとガードの分離により、堅牢な論理が保証されます。
内部アクティビティ
すべての変化が遷移を必要とするわけではありません。ときには、イベントが発生しても、システムは同じ状態のままアクションを実行します。これは内部アクティビティによって処理されます。内部アクティビティは現在の状態を退出せずに処理されるため、エントリーアクションやエグジットアクションは発動しません。
-
エントリーアクション: 状態に入るとすぐに実行される。
-
エグジットアクション: 状態を離れる直前に実行される。
-
ドーアクション: 状態にいる間に実行されるアクティビティです。イベントが遷移をトリガーするか、アクティビティが完了するまで継続します。
履歴を用いた複雑さの管理 🧠
システムが拡大するにつれて、状態機械は扱いにくくなることがあります。深いネストと多数の遷移は、追跡が難しいネットワークを生み出します。履歴状態は、複合状態の状態を保持することで、この問題に対する解決策を提供します。
シャロウ履歴とディープ履歴
履歴状態は、システムがどこで中断したかを記憶できるようにします。2つの異なるタイプがあります:
-
シャロウ履歴:複合状態が以前にアクティブだったことを示します。最後にアクティブだったサブ状態に状態を復元しますが、深さは1レベルまでです。
-
ディープ履歴: コンポジットマシンの正確な状態を復元します。これには、最後にアクティブだったサブ状態およびその中にネストされた任意のサブ状態が含まれます。
ヒストリステートを使用することは、一時停止して再開する操作を行うシステムにおいて特に有用です。システムが一時停止され、後に再開された場合、ディープヒストリステートにより、システムが一時停止した正確なポイントに戻ることを保証します。これにより、開始位置にリセットされるのを防ぎます。
実装戦略
ヒストリを組み込む際は、ヒストリステートのエントリポイントが明確であることを確認してください。ここでの曖昧さは、シミュレーション中に予測不能な動作を引き起こす可能性があります。常に、ヒストリステートを使用する理由を文書化してください。効率性のためですか?ユーザー体験の継続性のためですか?明確な意図は、将来の保守担当者にとって助けになります。
リージョンを用いた並行処理の扱い 🌐
複雑なシステムはしばしば複数のモードを同時に動作させます。単一の状態機械では並列処理を容易に表現できません。SysMLはリージョンを通じてこの問題を解決します。
並行リージョン
リージョンはコンポジット状態を独立したサブマシンに分割します。これらのサブマシンは並行して動作します。一方のリージョンでの遷移は、他のリージョンでの遷移をブロックしません。これはソフトウェア工学におけるマルチスレッディングに類似しています。
-
分割: 独立した動作に基づいて、状態機械を論理的なリージョンに分割する。
-
独立性: 一方のリージョンでのイベントは、明示的にリンクされていない限り、他のリージョンに本質的に影響を与えない。
-
同期: 必要に応じて、エントリポイントとエグジットポイントを用いてリージョン間の同期を図る。
例のシナリオ
ドローン制御システムを想像してください。1つのリージョンが「飛行制御」を担当し、高度と位置を管理します。別のリージョンが「通信」を担当し、テレメトリとコマンド受信を管理します。これらは並行して動作します。通信リンクが失われた場合、「飛行制御」リージョンは「ホームに戻る」アクションをトリガーする可能性がありますが、通信リージョン内のテレメトリ記録は停止せずに継続されます。
振る舞いと構造の接続 🔗
状態機械は真空の中で存在するものではありません。特定のブロックや部品の振る舞いを記述しています。状態機械を構造図にリンクすることは、トレーサビリティのために不可欠です。
状態機械のコンテキスト
すべての状態機械は、コンテキストによって所有されなければなりません。このコンテキストは通常、ブロックまたは部品です。コンテキストは振る舞いの範囲を定義します。たとえば、「バッテリー」ブロックには、充電レベルを記述する状態機械が存在するかもしれません。また、「車両」ブロックには、運用モードを記述する状態機械が存在するかもしれません。
ポートとインターフェース
遷移はしばしば外部環境と相互作用します。この相互作用は、ポートとインターフェースを通じて管理されます。状態機械はこれらの接続子を介して信号を送出したり、受信したりできます。これらのインターフェースを正しく定義することで、振る舞いモデルが大規模なシステムアーキテクチャに統合可能であることが保証されます。
-
必須インターフェース: 状態機械が環境から必要とするものを示します。
-
提供インターフェース: 状態機械が環境に提供するものを示します。
検証と整合性チェック ✅
モデルが構築された後は、検証が必要です。視覚的に良いように見えるモデルでも、論理的な誤りを含んでいる可能性があります。検証により、振る舞いが整合していることを確認できます。
到達可能性解析
初期状態からすべての状態に到達可能かどうかを確認してください。到達不能な状態(入ることができない状態)は、モデル作成の誤りを示しています。逆に、すべての状態が最終状態または安定状態に到達できるようにする必要があります。無限ループは意図的であるべきであり、文書化されている必要があります。
イベントカバレッジ
各状態について、予期せぬイベントが発生した場合に何が起こるかを決定する。特定のイベントに対して遷移が定義されていない場合、システムは停止するか、定義されていない状態に入ってしまう可能性がある。これらの状況を管理するために、デフォルトの動作または例外処理状態を定義する。
トレーサビリティ
状態機械の要素を要件にリンクする。要件に「温度がXを超える場合、システムは停止しなければならない」とある場合、モデルにそれに対応する状態または遷移が存在しなければならない。このトレーサビリティは認証およびコンプライアンスプロセスにおいて不可欠である。
持続可能なモデリングのためのベストプラクティス 📝
モデルの品質を長期間にわたり維持するため、以下の実践を守る。
-
シンプルを心がける:不要なネストを避ける。複合状態が大きくなりすぎた場合は、別々の状態機械に分割することを検討する。
-
命名規則を使用する:状態、イベント、アクションに対して一貫した命名は、ナビゲーションや検索を容易にする。
-
仮定を文書化する:特定の論理が存在する理由を説明するためのメモを追加する。将来のエンジニアは元の制約を知らない可能性がある。
-
定期的に見直す:要件が変化するにつれてモデルも進化する。動作モデルが現在の設計と一致していることを確認するために、定期的なレビューをスケジュールする。
避けたい一般的な落とし穴 🚫
経験豊富なエンジニアでもミスを犯すことがある。一般的な誤りへの意識は、予防に役立つ。
-
イベントとアクションを混同する:イベントは遷移をトリガーする。アクションは実行される。両者を混同してはならない。
-
エントリ/エグジットを無視する:状態に入ったり出たりするときの処理を定義しないと、リソースリークや一貫性のない設定につながる可能性がある。
-
過剰な並列化:あまりにも多くの領域を使用すると、モデルが理解しにくくなる。動作が本当に独立している場合にのみ並列化を行う。
-
ガードの欠如:トリガーにのみ依存すると、ガード条件が明示されていない場合、予期しない遷移が発生する可能性がある。
主要なコンセプトの要約 📌
効果的な状態機械を構築するには、厳密なアプローチが必要である。基本要素である状態、遷移、イベントから始め、履歴状態、領域、内部アクティビティによって複雑性を重ねていく。このプロセス全体を通して、動作がシステムの構造的要素と整合していることを確認しなければならない。検証は選択肢ではなく、信頼性を確保するための必須ステップである。
これらのガイドラインに従うことで、開発およびテストの信頼できるブループリントとなるモデルが作成される。状態機械は、高レベルの要件と低レベルの実装の間のギャップを埋めるコミュニケーションツールとなる。システムの動的な本質を捉え、動作の変更が正確かつ一貫してモデル化されることを保証する。
複雑さそのものではなく、明確さが目的であることを忘れないでください。理解しやすいシンプルで良好に構造化された状態機械は、理解困難な複雑な状態機械よりも価値が高い。論理に注目し、意図を文書化し、経路を検証する。このアプローチにより、現場で期待通りに動作する堅牢なシステムが実現する。