











系统工程在很大程度上依赖于描述系统不仅是什么,而且如何随时间变化的能力。静态结构,如块图,定义了组件及其关系。然而,动态行为需要不同的方法。SysML 状态机提供了建模这种动态特性的必要框架。本指南探讨了创建稳健状态机图的机制,确保您的系统设计准确反映现实世界的操作逻辑。我们将研究核心组件、执行流程以及在不引入不必要的混乱的情况下处理复杂性的策略。
理解核心目的 🏗️
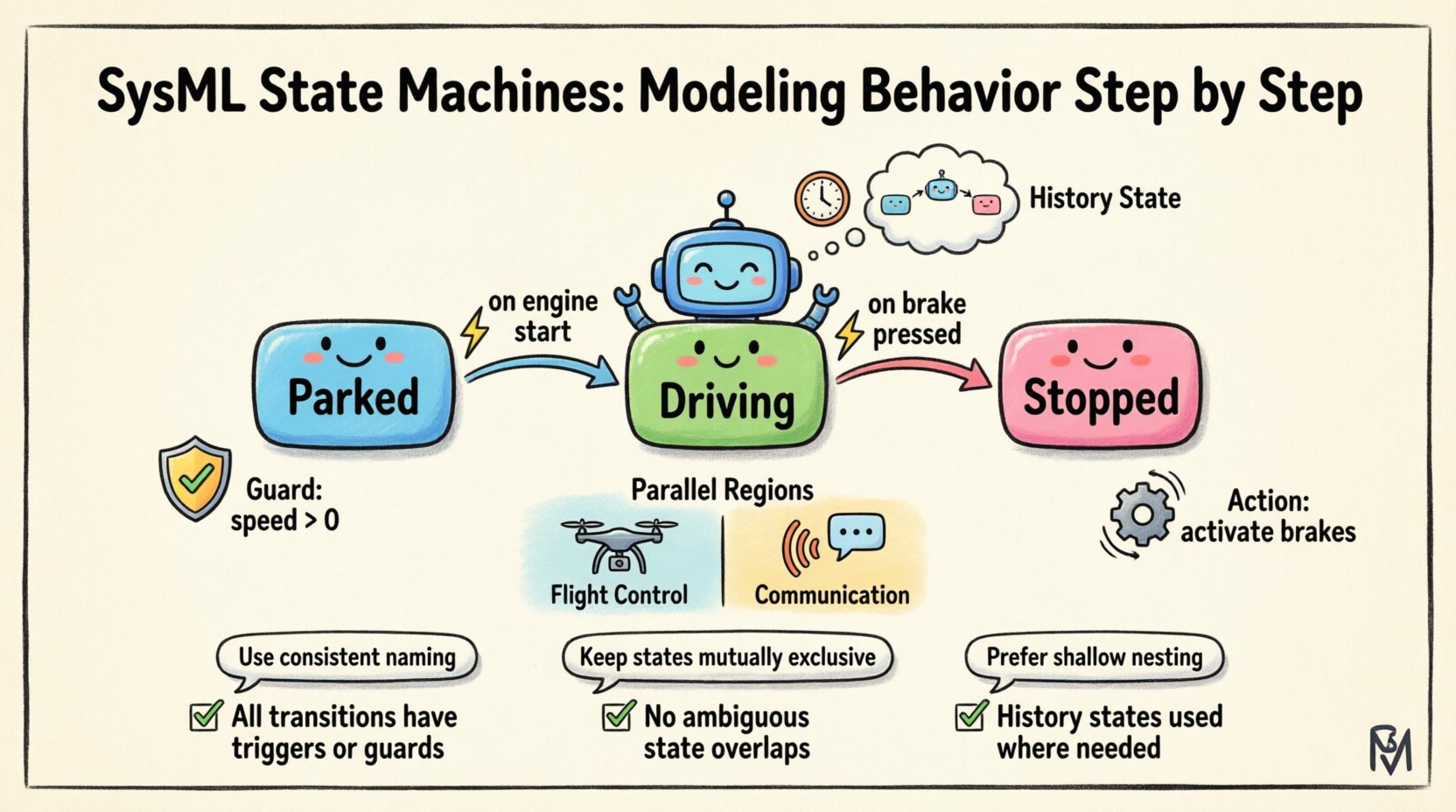
状态机图描述了对象可能处于的状态以及引发这些状态之间转换的事件。与描绘流程的流程图不同,状态机跟踪的是实体的状态。这一区别对于当前上下文决定未来行为的系统至关重要。例如,自动驾驶汽车在‘停车’状态和‘行驶’状态时必须表现出不同的行为。
在构建这些模型时,目标是清晰。设计良好的状态机可以消除系统对输入反应方式的模糊性。它定义了对象从创建到终止的生命周期。这种生命周期管理对于确保涵盖所有操作场景至关重要。缺乏这一点,逻辑上的漏洞可能导致系统在部署时出现故障。
为什么状态机很重要
-
清晰性:视觉表示在分析复杂逻辑时降低了认知负荷。
-
验证: 支持仿真和检查所有可能的路径。
-
文档: 作为开发人员和工程师的单一事实来源。
-
一致性: 确保行为规则在整个系统中一致应用。
定义基本元素 ⚙️
要构建状态机,必须理解其基本构成单元。每个元素在逻辑流程中都有特定功能。误用这些元素可能导致难以维护或理解的模型。
状态
状态表示对象在满足某种条件、执行某种活动或等待某个事件期间所处的条件或情况。它们是图中的节点。状态可以是简单的,也可以是复合的。
-
简单状态: 没有内部结构的状态。
-
复合状态: 包含自身内部状态机的状态。这允许嵌套,通过将大型行为分解为可管理的子行为来管理复杂性。
-
最终状态: 标记生命周期的结束。可以有多个最终状态,但每个转换路径应理想地导向一个。
转换
转换连接状态。它们表示从一种条件到另一种条件的移动。当事件触发转换,并且任何相关的守卫条件都满足时,转换才会发生。一旦转换发生,转换上定义的动作将被执行。
事件
事件是引发转换的触发器。它们可以是信号事件、调用事件、变化事件或时间事件。事件本身不会执行逻辑;它启动转换过程。
构建逻辑流程 🛣️
构建行为模型涉及使用转换连接状态。本节详细说明控制转换执行方式的具体属性。
触发器和守卫
转换通常包含一个触发器。这是唤醒系统并考虑转移的事件。然而,转移并不总是正确的响应。守卫条件充当过滤器。守卫是一个布尔表达式,必须求值为真,转换才能触发。
|
元素 |
功能 |
示例 |
|---|---|---|
|
触发器 |
启动转换 |
按钮被按下 |
|
守卫 |
验证条件 |
[电池电量 > 20%] |
|
动作 |
在转换过程中执行 |
log_entry() |
考虑一个系统进入“维护模式”的场景。触发器可能来自操作员的命令。然而,守卫条件可能要求系统当前未在执行关键任务。触发器与守卫的分离确保了逻辑的稳健性。
内部活动
并非所有变化都需要转换。有时,事件发生,但系统保持在相同状态并执行某个动作。这由内部活动处理。内部活动在不退出当前状态的情况下处理,这意味着不会触发进入和退出动作。
-
进入动作: 在进入状态时立即执行。
-
退出动作: 在离开状态前立即执行。
-
执行动作: 在状态中执行的活动。它会持续进行,直到事件触发转换或活动完成。
使用历史记录管理复杂性 🧠
随着系统规模的增长,状态机可能变得难以管理。深层嵌套和大量转换会形成一个难以追踪的网络。历史状态通过保留复合状态的状态来解决这一问题。
浅层历史与深层历史
历史状态使系统能够记住它之前的位置。有两种不同的类型:
-
浅层历史:表示复合状态之前曾处于活动状态。它将状态恢复到上一个活跃的子状态,但仅恢复到一层深度。
-
深层历史: 恢复复合机器的精确状态。这包括最后一个活动的子状态以及其中任何嵌套的子状态。
使用历史状态在暂停和恢复操作的系统中尤其有用。如果系统被暂停后再次恢复,深层历史状态可确保其返回到暂停的确切位置,而不是重置到开始状态。
实现策略
在引入历史状态时,确保历史状态的入口点清晰明确。此处的模糊性可能导致模拟过程中出现不可预测的行为。始终记录使用历史状态的原因。是为了效率?还是为了用户体验的连续性?明确的意图有助于未来的维护者理解。
使用区域处理并发 🌐
复杂系统通常同时在多个模式下运行。单一的状态机难以轻松表示并行过程。SysML 通过区域来解决这一问题。
并行区域
区域将复合状态划分为独立的子机器。这些子机器并发运行。一个区域中的转换不会阻塞另一个区域中的转换。这类似于软件工程中的多线程。
-
划分: 根据独立的行为将状态机划分为逻辑区域。
-
独立性: 一个区域中的事件不会自动影响其他区域,除非明确关联。
-
同步: 必要时使用进入和退出点来协调区域之间的行为。
示例场景
想象一个无人机控制系统。一个区域负责“飞行控制”,管理高度和位置。另一个区域负责“通信”,管理遥测和命令接收。这两个区域并行运行。如果通信链路中断,“飞行控制”区域可能会触发“返航”操作,而不会停止通信区域中的遥测日志记录。
将行为与结构连接 🔗
状态机并非孤立存在。它描述的是特定块或部件的行为。将状态机与结构图关联对于可追溯性至关重要。
状态机上下文
每个状态机都必须由一个上下文拥有。该上下文通常是块或部件。上下文定义了行为的作用范围。例如,“电池”块可能拥有一个描述其充电水平的状态机。“车辆”块可能拥有一个描述其运行模式的状态机。
端口和接口
转换通常与外部环境交互。这种交互通过端口和接口进行管理。状态机可以通过这些连接器发送信号或接收信号。正确地定义这些接口,可确保行为模型能够集成到更大的系统架构中。
-
所需接口: 表示状态机从其环境中需要什么。
-
提供的接口: 表示状态机向环境提供什么。
验证与一致性检查 ✅
模型构建完成后,必须进行验证。一个在视觉上看起来良好的模型仍可能包含逻辑错误。验证可确保行为是合理的。
可达性分析
检查每个状态是否都能从初始状态到达。死状态(无法进入的状态)表明存在建模错误。反之,确保每个状态最终都能到达终止状态或稳定状态。无限循环应是故意设计的,并且必须记录在案。
事件覆盖
对于每个状态,确定如果发生意外事件会如何处理。如果某个特定事件没有定义相应的转换,系统可能会停止运行或进入未定义状态。应定义默认行为或异常处理状态来管理这些情况。
可追溯性
将状态机元素与需求关联起来。如果需求中规定“当温度超过X时系统必须关闭”,模型中应存在相应的状态或转换。这种可追溯性对于认证和合规流程至关重要。
可持续建模的最佳实践 📝
为了长期保持模型的质量,请遵循以下实践。
-
保持简单:避免不必要的嵌套。如果复合状态变得过于庞大,应考虑将其拆分为独立的状态机。
-
使用命名规范:状态、事件和动作使用一致的命名有助于导航和搜索。
-
记录假设:添加注释以解释为何存在某些逻辑。未来的工程师可能不了解原始约束条件。
-
定期审查:随着需求的变化,模型也会随之演变。应安排定期审查,以确保行为模型与当前设计一致。
应避免的常见陷阱 🚫
即使是经验丰富的工程师也可能犯错。了解常见错误有助于预防。
-
混淆事件与动作:事件触发转换,动作被执行。不要将两者混淆。
-
忽略进入/退出:未定义进入或离开状态时的行为,可能导致资源泄漏或配置不一致。
-
过度并行化:使用过多区域会使模型难以理解。只有当行为真正独立时才应进行并行化。
-
缺少守卫条件:如果未明确守卫条件,仅依赖触发器可能导致意外的转换。
关键概念总结 📌
构建高效的状态机需要有纪律的方法。您从基本元素开始:状态、转换和事件。然后通过历史状态、区域和内部活动引入复杂性。在整个过程中,必须确保行为与系统的结构组件保持一致。验证不是可选的,而是确保可靠性的必要步骤。
遵循这些指导原则,您将创建一个可作为开发和测试可靠蓝图的模型。状态机成为一种沟通工具,弥合了高层需求与底层实现之间的差距。它捕捉了系统的动态本质,确保行为变化被准确且一致地建模。
请记住,目标不是为了复杂而复杂。目标是清晰。一个简单且结构良好的状态机,比一个难以理解的复杂状态机更有价值。专注于逻辑,记录意图,并验证路径。这种方法将带来在实际环境中按预期运行的稳健系统。