











系統工程極大依賴於描述系統不僅僅是其結構,還包括其隨時間演變的行為。靜態結構,例如方塊圖,定義了組件及其關係。然而,動態行為需要不同的方法。SysML 狀態機器提供了建模這種動態特性的必要框架。本指南探討了建立穩健狀態機器圖的機制,確保您的系統設計準確反映現實世界的操作邏輯。我們將檢視核心組件、執行流程,以及在不引入不必要的混亂情況下處理複雜性的策略。
理解核心目的 🏗️
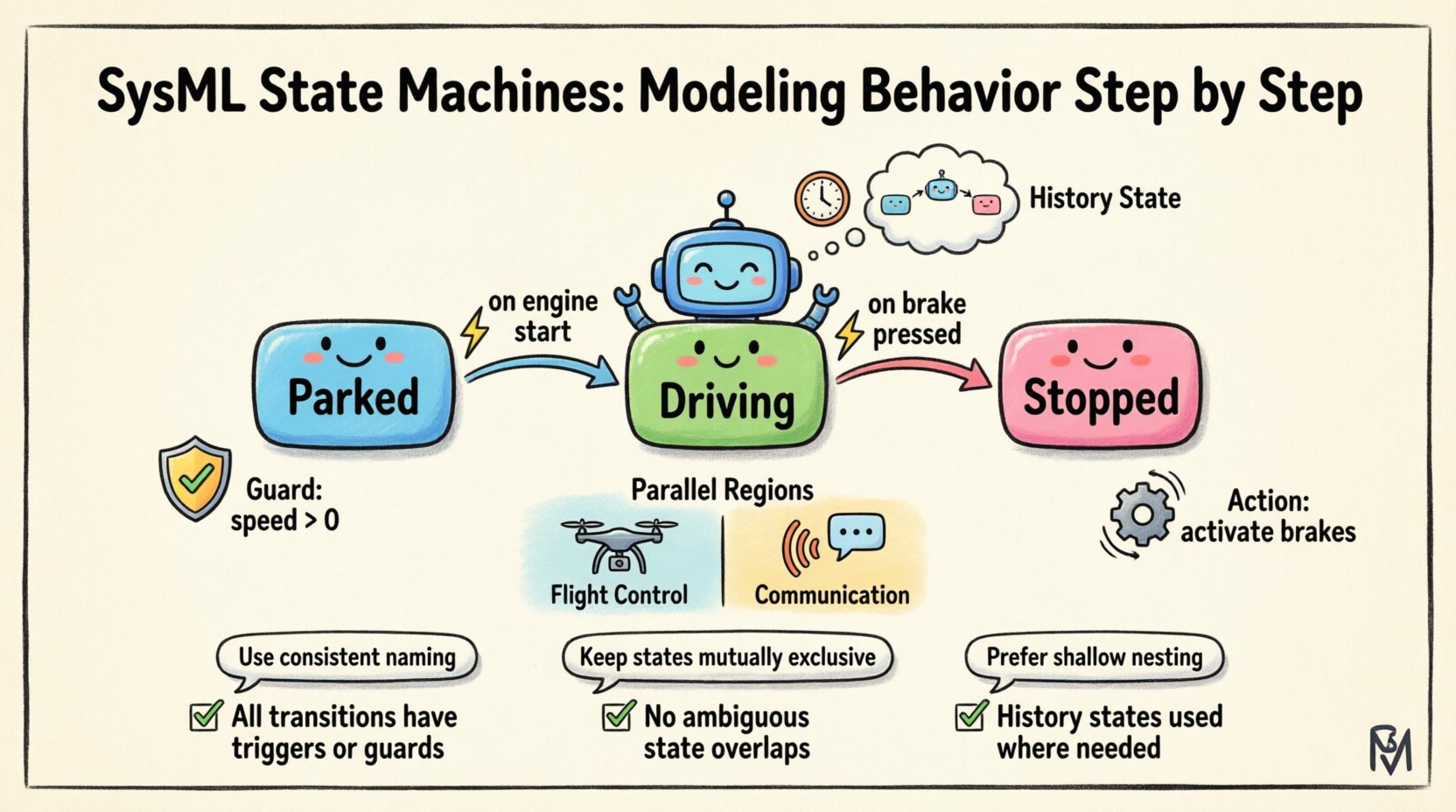
狀態機器圖描述了一個物件可能處於的狀態,以及引發這些狀態之間轉移的事件。與描述流程的流程圖不同,狀態機器追蹤的是實體的狀態。這種區別對於當前情境決定未來動作的系統尤為關鍵。例如,自動駕駛車輛在「停車」狀態與「行駛」狀態下必須表現出不同的行為。
在構建這些模型時,目標是清晰明確。設計良好的狀態機器可消除系統對輸入反應方式的模糊性。它定義了物件從創建到終止的整個生命週期。這種生命週期管理對於確保涵蓋所有操作情境至關重要。若缺乏此項,邏輯上的漏洞可能導致系統在部署時發生故障。
為什麼狀態機器至關重要
-
清晰性:視覺化呈現能降低分析複雜邏輯時的認知負荷。
-
驗證: 支援模擬與所有可能路徑的檢驗。
-
文件化: 可作為開發人員與工程師的唯一真實來源。
-
一致性: 確保行為規則在整個系統中一致應用。
定義基本元件 ⚙️
要建立狀態機器,必須理解其基本構建模塊。每個元件在邏輯流程中都具有特定功能。錯誤使用這些元件,可能導致模型難以維護或理解。
狀態
狀態代表物件在滿足某種條件、執行某項活動或等待某個事件期間所處的條件或情境。它們是圖形中的節點。狀態可以是簡單的,也可以是複合的。
-
簡單狀態: 無內部結構的狀態。
-
複合狀態: 包含自身內部狀態機器的狀態。這允許巢狀結構,透過將大型行為分解為可管理的子行為來管理複雜性。
-
終止狀態: 标記生命週期的結束。可以有多個終止狀態,但每條轉移路徑應理想地導向一個。
轉移
轉移連接狀態。它們代表從一種條件轉移到另一種條件的過程。轉移由事件觸發,前提是相關的守衛條件已滿足。一旦轉移發生,轉移上定義的動作將被執行。
事件
事件是引發轉移的觸發因素。它可以是訊號事件、呼叫事件、變更事件或時間事件。事件本身不會執行邏輯;它僅啟動轉移過程。
構建邏輯流程 🛣️
建立行為模型涉及以轉移連接狀態。本節詳細說明控制轉移執行方式的特定屬性。
觸發器與保護條件
轉移通常包含一個觸發器。這是喚醒系統並考慮移動的事件。然而,移動並不總是正確的回應。保護條件起到過濾作用。保護條件是一個布林表達式,必須評估為真,轉移才能觸發。
|
元素 |
功能 |
範例 |
|---|---|---|
|
觸發器 |
啟動轉移 |
按鈕被按下 |
|
保護條件 |
驗證條件 |
[電池電量 > 20%] |
|
動作 |
在轉移期間執行 |
log_entry() |
考慮一個系統進入「維護模式」的情境。觸發器可能是來自操作員的指令。然而,保護條件可能要求系統目前未在執行關鍵任務。觸發器與保護條件的分離確保了邏輯的穩健性。
內部活動
並非所有變更都需要轉移。有時會發生事件,但系統仍停留在同一狀態並執行某項動作。這由內部活動處理。內部活動在不離開當前狀態的情況下處理,因此不會觸發進入和離開動作。
-
進入動作: 在進入狀態的瞬間立即執行。
-
離開動作: 在離開狀態的瞬間立即執行。
-
執行動作: 在狀態中執行的活動。會持續進行,直到事件觸發轉移或活動完成。
利用歷史記錄管理複雜性 🧠
隨著系統的擴展,狀態機可能變得難以管理。深度嵌套和大量轉移會形成一個難以追蹤的網絡。歷史狀態通過保留複合狀態的狀態來解決此問題。
淺層歷史與深層歷史
歷史狀態允許系統記住它之前的位置。有兩種不同的類型:
-
淺層歷史:表示複合狀態之前曾處於活躍狀態。它會將狀態還原到最後一個活躍的子狀態,但僅限於一層深度。
-
深層歷史: 恢復複合機器的精確狀態。這包括最後活躍的子狀態以及其中任何嵌套的子狀態。
使用歷史狀態在暫停和恢復操作的系統中尤為有用。如果系統暫停後再恢復,深度歷史狀態可確保系統返回到暫停的精確位置,而非重置到起始點。
實施策略
引入歷史狀態時,請確保歷史狀態的入口點明確。此處的模糊性可能導致模擬期間行為不可預測。始終記錄使用歷史狀態的原因。是為了效率?還是為了使用者經驗的連續性?明確的意圖有助於未來的維護者。
使用區域處理並發 🌐
複雜系統通常會同時在多種模式下運作。單一狀態機難以輕鬆表示並行流程。SysML 透過區域來解決此問題。
平行區域
區域將複合狀態劃分為獨立的子機器。這些子機器並行運作。一個區域中的轉移不會阻塞另一個區域中的轉移。這類似於軟體工程中的多執行緒。
-
分區: 根據獨立行為將狀態機劃分為邏輯區域。
-
獨立性: 一個區域中的事件不會自動影響其他區域,除非明確連結。
-
同步: 必要時使用進入和退出點來協調區域之間的動作。
範例情境
想像一個無人機控制系統。一個區域負責「飛行控制」,管理飛行高度與位置。另一個區域負責「通訊」,管理遙測與指令接收。這兩個區域並行運作。如果通訊鏈路中斷,「飛行控制」區域可能觸發「返航」動作,而無需停止通訊區域中的遙測記錄。
將行為與結構相連 🔗
狀態機並非孤立存在。它描述的是特定模組或元件的行為。將狀態機與結構圖連結,對於可追溯性至關重要。
狀態機的上下文
每個狀態機都必須由一個上下文擁有。此上下文通常是一個模組或元件。上下文定義了行為的範圍。例如,「電池」模組可能擁有一個狀態機來描述其電量水平;「車輛」模組可能擁有一個狀態機來描述其運作模式。
埠與介面
轉移通常與外部環境互動。這種互動透過埠與介面進行管理。狀態機可透過這些連接器發送訊號或接收訊號。正確定義這些介面,可確保行為模型能整合至更大的系統架構中。
-
所需介面:表示狀態機從環境中需要的內容。
-
提供介面:表示狀態機向環境提供的內容。
驗證與一致性檢查 ✅
模型建構完成後,必須進行驗證。即使模型在視覺上看起來良好,仍可能包含邏輯錯誤。驗證可確保行為是正確的。
可達性分析
檢查每個狀態是否都能從初始狀態到達。死狀態(無法進入的狀態)表示建模錯誤。反之,確保每個狀態最終都能到達終止狀態或穩定狀態。無限循環應為有意設計並加以記錄。
事件覆蓋
針對每個狀態,確定若發生意外事件時會發生什麼情況。如果針對特定事件未定義轉移,系統可能會停止運作或進入未定義狀態。應定義預設行為或例外處理狀態,以管理這些情境。
可追溯性
將狀態機元件與需求連結。若需求指出「系統在溫度超過 X 時必須關機」,模型中應有對應的狀態或轉移。這種可追溯性對於認證與合規流程至關重要。
永續建模的最佳實務 📝
為維持模型的品質,請遵循以下實務。
-
保持簡單:避免不必要的巢狀結構。若複合狀態過於龐大,應考慮將其拆分為獨立的狀態機。
-
使用命名規範:狀態、事件與動作的命名一致,有助於導航與搜尋。
-
記錄假設:加入註解以解釋特定邏輯存在的原因。未來的工程師可能不了解原始限制。
-
定期審查:隨著需求變更,模型也會演進。應安排定期審查,確保行為模型與目前設計相符。
應避免的常見陷阱 🚫
即使經驗豐富的工程師也可能犯錯。了解常見錯誤有助於預防。
-
混淆事件與動作:事件觸發轉移,動作則被執行。切勿將二者混淆。
-
忽略進入/離開:未定義進入或離開狀態時的行為,可能導致資源洩漏或設定不一致。
-
過度並行化:使用過多區域會使模型難以理解。僅當行為真正獨立時才應進行並行化。
-
遺漏守衛條件:若未明確設定守衛條件,僅依賴觸發器可能導致非預期的轉移。
關鍵概念摘要 📌
建立有效的狀態機需要有紀律的方法。您從基本元件開始:狀態、轉移與事件。接著透過歷史狀態、區域與內部活動增加複雜性。整個過程中,必須確保行為與系統的結構元件一致。驗證並非可有可無,而是確保可靠性的必要步驟。
遵循這些指引,您將建立一個可作為開發與測試可靠藍圖的模型。狀態機成為溝通工具,彌補高階需求與低階實作之間的差距。它捕捉系統的動態本質,確保行為變更能被準確且一致地建模。
請記住,目標並非為複雜而複雜。目標是清晰。一個簡單且結構良好的狀態機,比一個難以理解的複雜狀態機更有價值。專注於邏輯,記錄意圖,並驗證路徑。這種方法能導向在現場表現如預期的穩健系統。